

今年,ETH與Meta(原Facebook)合作發表論文採用EM-Pose電磁追蹤技術,利用電磁傳感器進行使用者的姿勢辨別,成為一種6DoF的電磁解決方案,雖然商用門檻存在,但不失一個可研究的方向。傳統的6DoF技術仰賴外部相機的追蹤,因此追蹤上容易有視覺盲區的問題存在,採用EM-Pose電磁追蹤技術則可以大大減少使用者在動作上的限制。
6DoF技術
在要VR中有良好的運動體驗,則少不了6DoF(6 degree of freedom)技術,否則只能淪為純粹觀影用的頭戴顯示裝置,而無法在VR空間中移動或互動。6DoF技術是根據傳感器得知兩個座標之間的位置,將其位置座標點平移和旋轉後完成追蹤的動作,我們將三維空間以XYZ三軸表示,根據三軸平移,稱為前後、左右、上下,而根據三軸旋轉,稱為縱搖(pitch)、橫搖(roll)和垂搖(yaw),如此構成了6種自由度。目前幾年前的消費級VR產品通常為3DoF,也就是縱搖、橫搖和垂搖追蹤,而今日的消費級VR則多為6DoF追蹤。至於市面上聲稱的9DoF追蹤,則是將慣性測量單元(Inertial measurement unit,IMU)將其加速度計、陀螺儀和磁力計的數據來輔助原本6DoF的追蹤效果,效果理論上也會更好。但就論現實生活僅有6DoF,9DoF是一種包裝的宣傳說法。
目前市面上的VR產品採用的6DoF追蹤技術又分為outside-in和inside-out兩種,前者可以透過基地台(basestation或light house)讓使用者在設定的空間內使用,並追蹤使用者運動,後者則是利用控制器與頭戴顯示器的紅外光訊號進行校準。兩者缺點可想而知,前者精度勢必較差,並且需要有一定大小的活動空間限制,而後者精度會隨捕捉訊號的相機而有所差異,並且鏡頭具有其視野盲區,所以通常會儘量採用大視野率的鏡頭,其機構設計又是另一個課題。此外,若環境對紅外光有一定影響時,也會讓6DoF的效果出問題,像是空間中帶有過多反光表面的物體。
")
6個自由度示意圖(圖片來源:維基百科)
EM-Pose技術姿勢
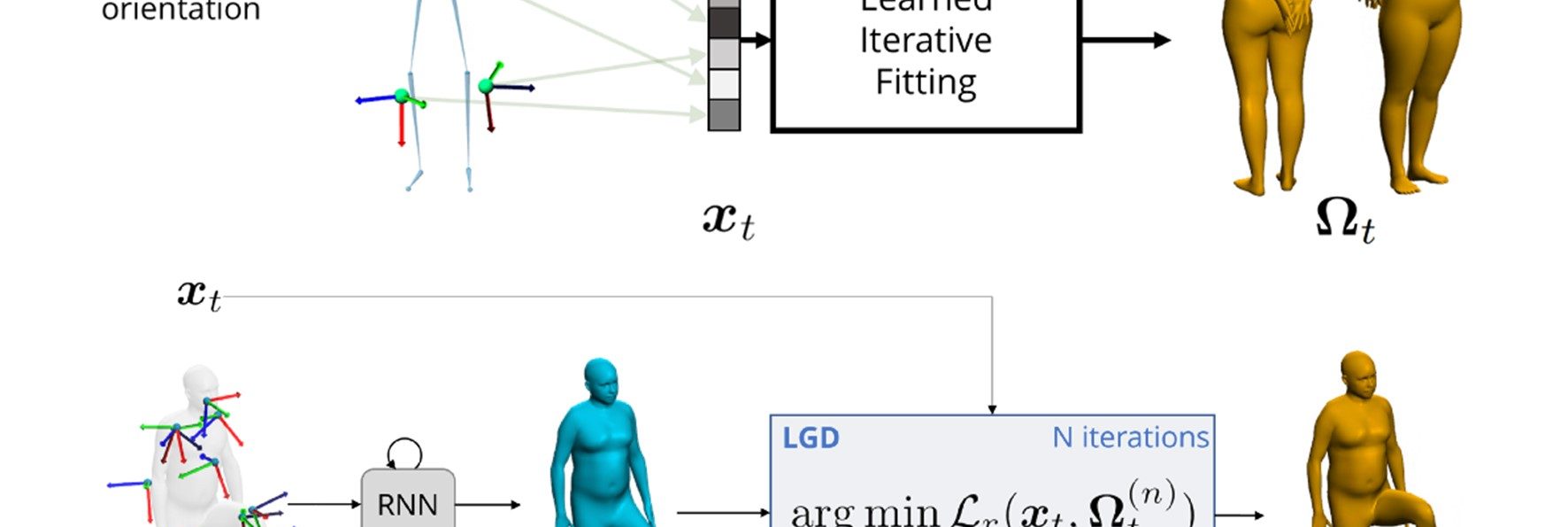
ETH與Meta合作發表論文採用EM-Pose電磁追蹤技術,利用電磁傳感器進行使用者的姿勢辨別。將發射源置於腰後,搭配6~12個無線電磁傳感器,如此便不再有視野盲區的問題,誤差可達4 cm以下,在影片中可以看到使用者動作與渲染人物動作基本可以完好的重疊。但缺點是必須要另外穿戴這些電磁傳感器裝置,而精度會隨人物的姿勢而有差異,並且穿戴若不穩固會產生精度誤差的問題,最麻煩的是穿戴後必須進行長時間的校準,因此用於專業的影視拍攝渲染才有可能。至於B2C?相信沒有公司會願意考驗消費者的耐心吧!
")
EM發射器置於後腰(圖片來源:ETH)
")
EM-Pose計算方法(圖片來源:ETH)
資料來源
- 論文:[PDF]EM-POSE: 3D Human Pose Estimation from Sparse Electromagnetic Trackers
- 網頁:[網頁]EM-POSE: 3D Human Pose Estimation from Sparse Electromagnetic Trackers
- 影片:[YouTube]EM-POSE: 3D Human Pose Estimation from Sparse Electromagnetic Trackers








